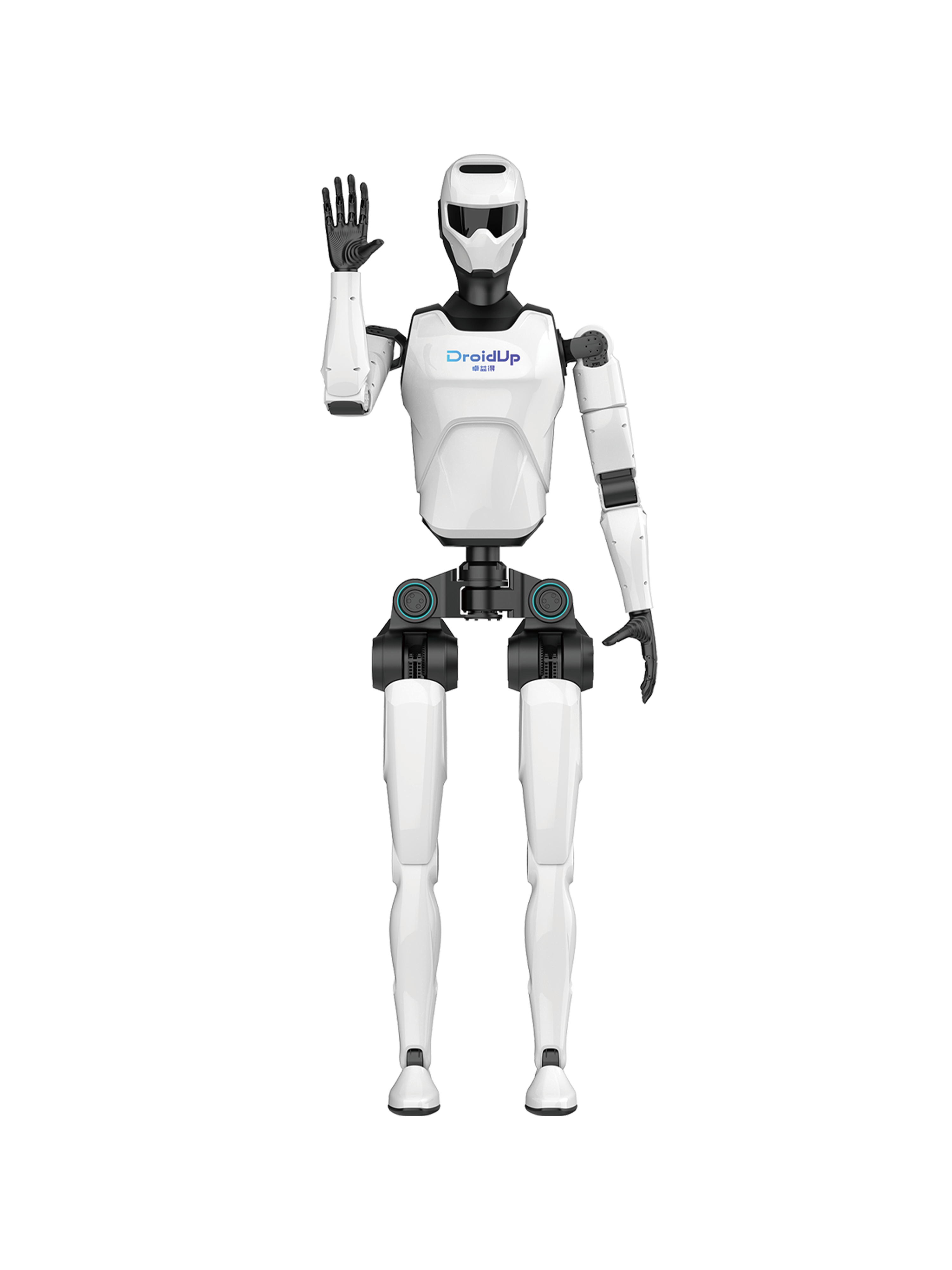
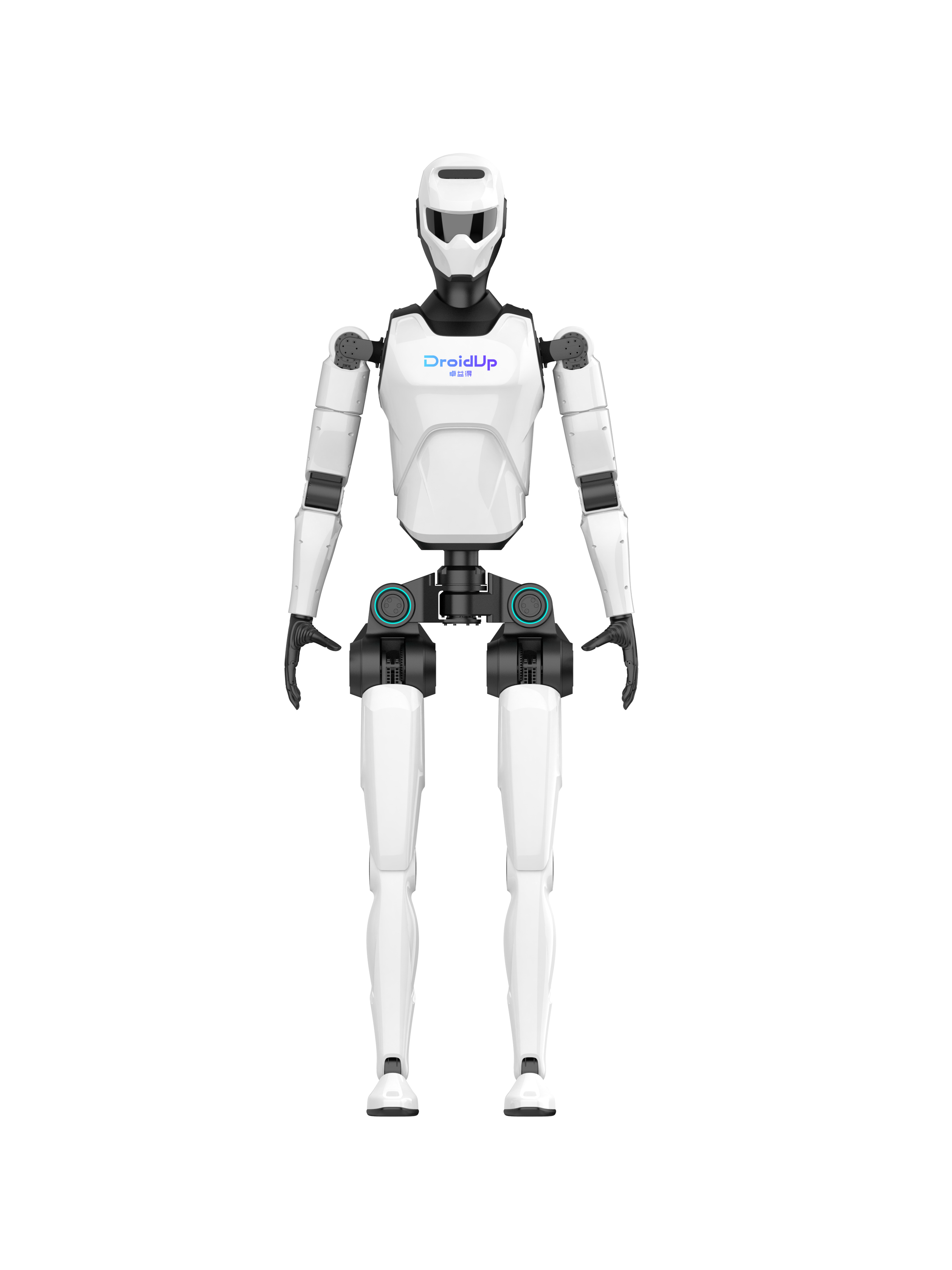
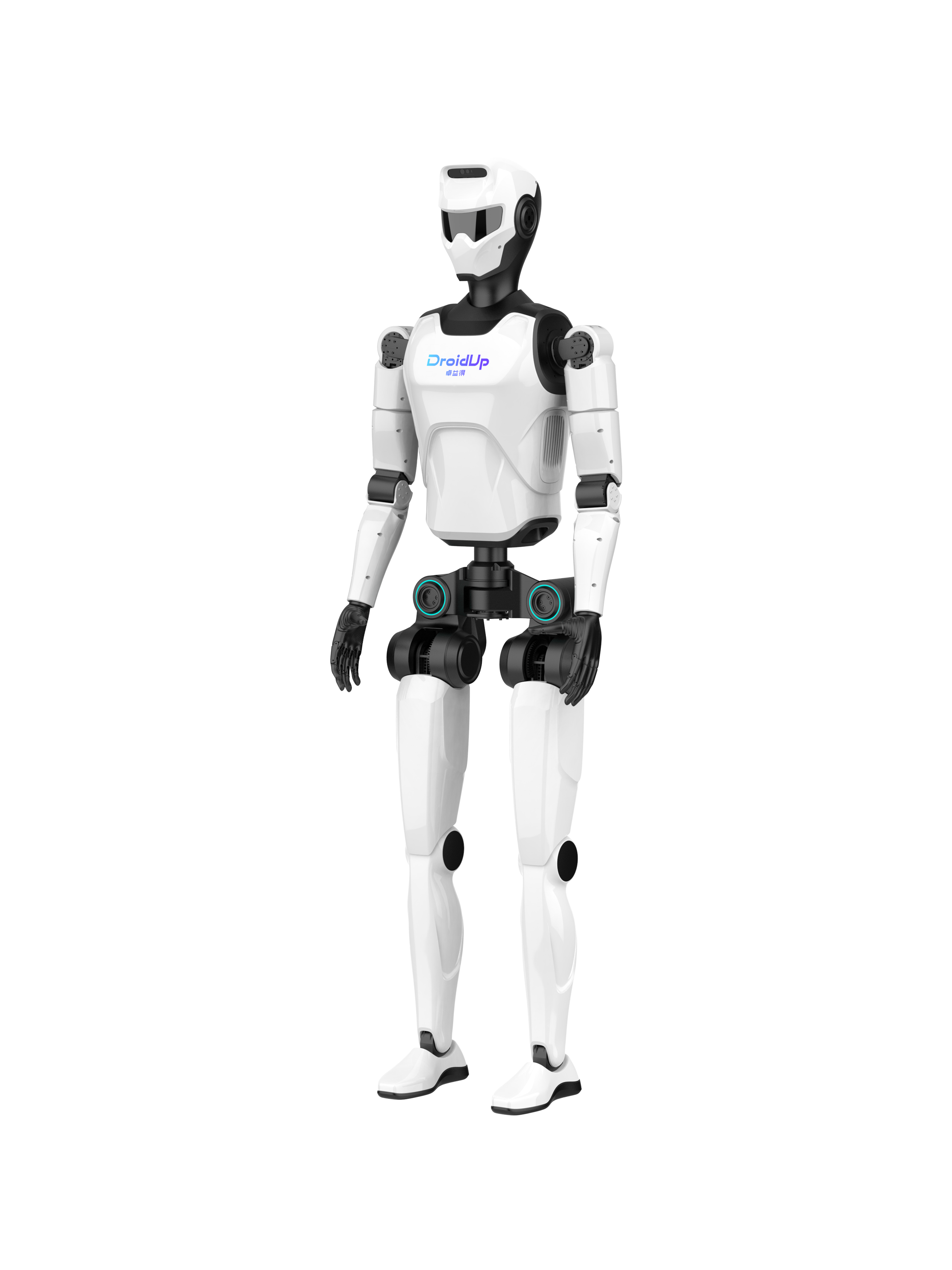
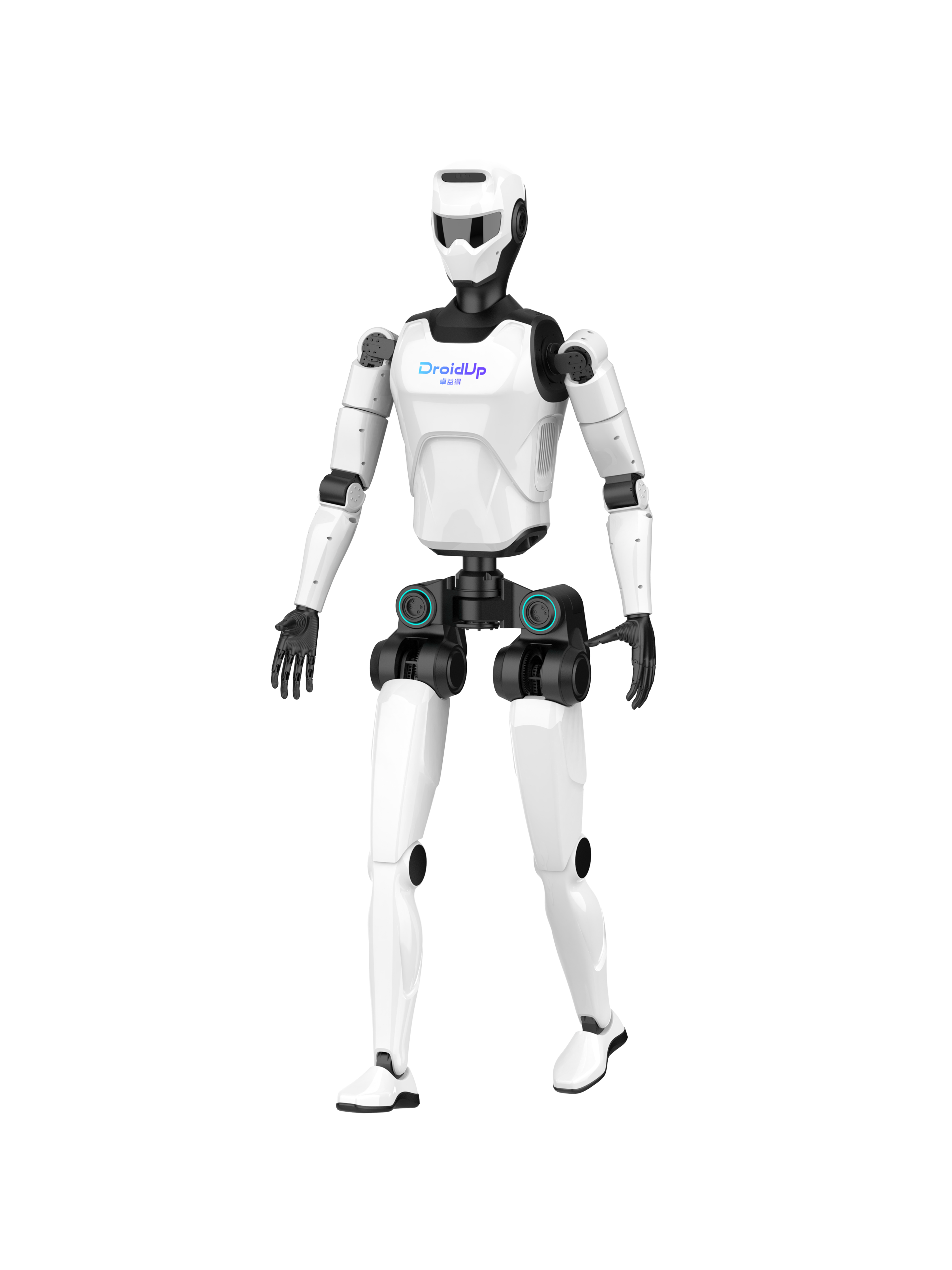
双足人形机器人—行者二号
全球首款基于仿生肌腱驱动技术的模块化人形机器人,采用肌腱与分布式电机协同驱动,关节刚度动态可调,实现类人步态(步速3m/s、越障15cm)与多地形自适应能力(碎石/坡地/楼梯)能耗较竞品降低25%,动态续航达6小时。
-
25 %
能耗较竞品降低
-
6 小时
动态续航达
-
参数特征
身体体重:32kg;身高:170cm;负载:40kg;单臂负重:5kg ;自由度:30DoF
智力运动控制算法:MPC+强化;单机算力(tops):端6/云200具身;
行动能力最大步速:9km/h;越障能力(坡度):30度;越障能力(台阶高度):15cm
感知视觉传感器(深度、红外、颜色):6组 ;听觉传感器:8阵列
-

科研教育
依托在双足机器人领域的深厚技术积淀,卓益得构建覆盖基础、职业、高等教育全学段的科研教育方案,形成“理论课程+实操训练+赛事验证”体系,助力学习者深度掌握机器人核心知识。目前已与控江中学、上海中学等携手打造多个实验中心,联合清华美院、上海戏剧学院设科艺融合实验室,开展课程共建、科研合作,助力学生提升技能,推动产学研转化。
-

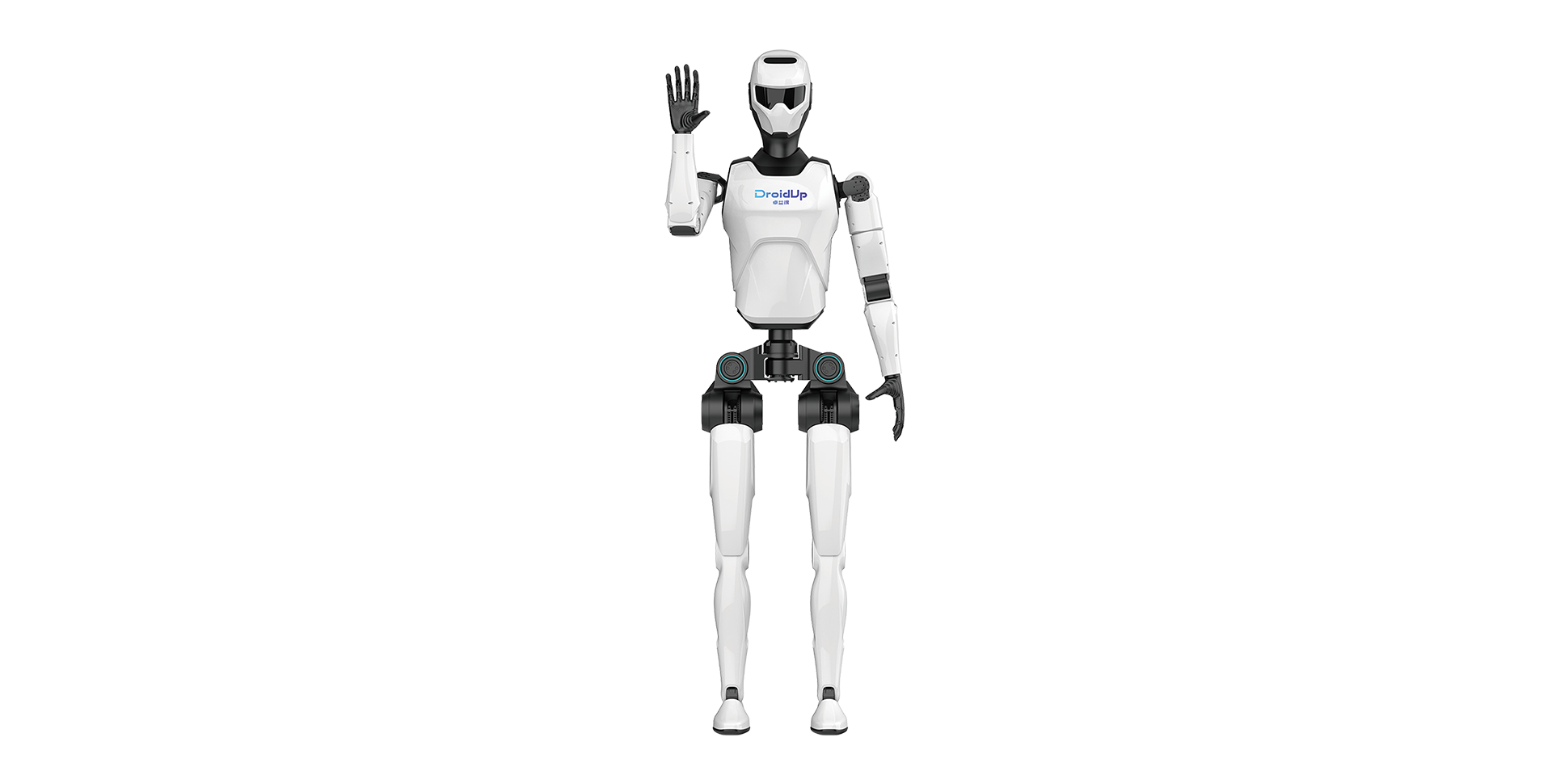
接待导览
“行者二号”凭硬核技术升级参观体验:自主导航避障,能在人群中灵活穿梭;视觉识别精准,快速响应访客指令;搭配自然双足步态与百万级语音库,对话流畅、行动优雅,可清晰讲解展区信息。目前已服务张江机器人谷未来体验馆、AI之梦展馆、如意湖导览及鸿蒙展厅等场景,为各地访客带来专业、高效的智能导览体验。
-

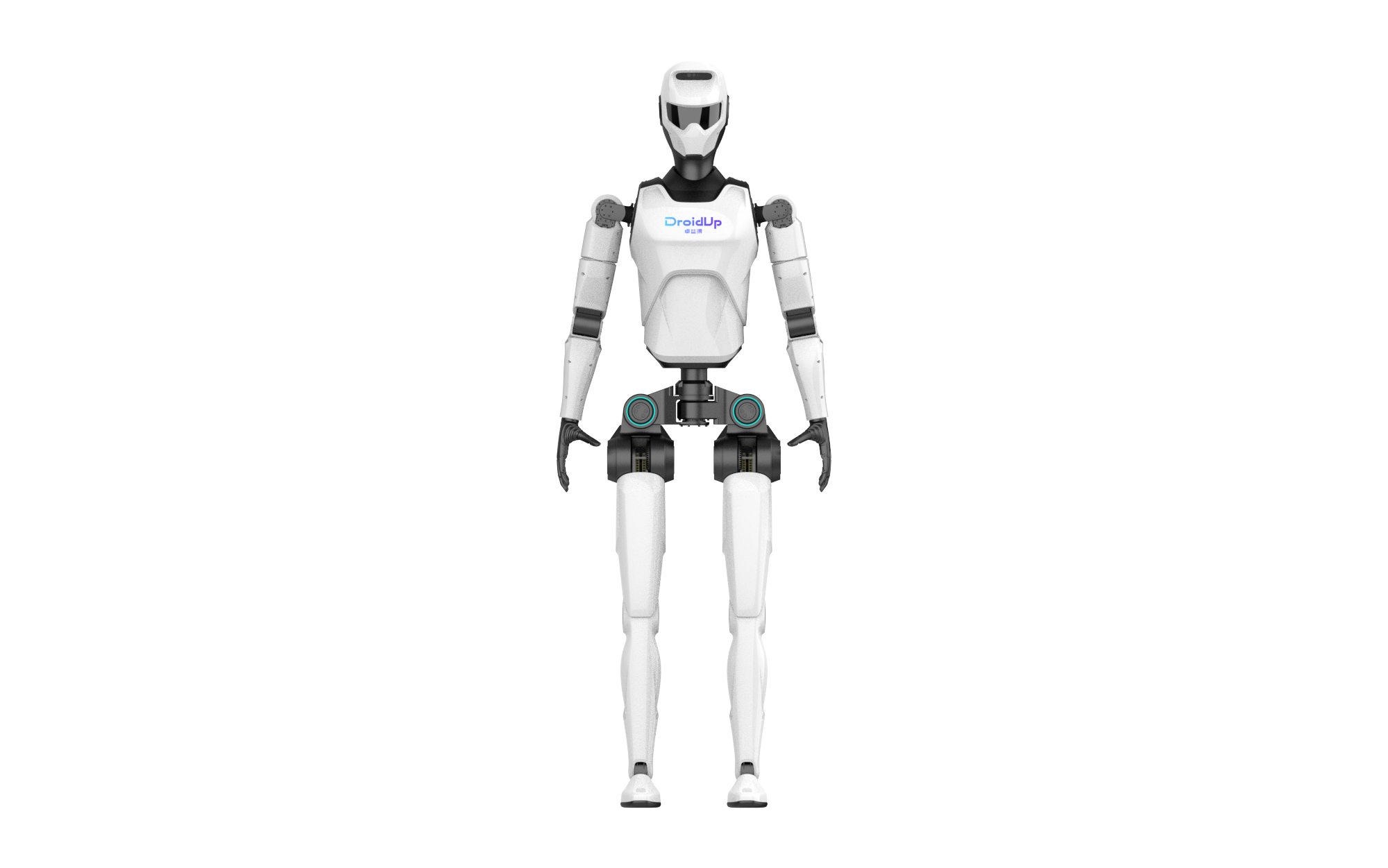
安防巡检
针对城市安防“静态体系”VS“动态风险”矛盾的痛点,卓益得双足机器人构建了新型安防巡检模式。其具备长时间高效运行能力,可在园区、厂区等复杂场景中灵活穿梭,适应台阶、斜坡等多地形环境,精准补充监控盲区。通过实时采集画面、异常情况预警,为安防工作提供24小时不间断支持,大幅提升安防管控精度与响应速度。
-
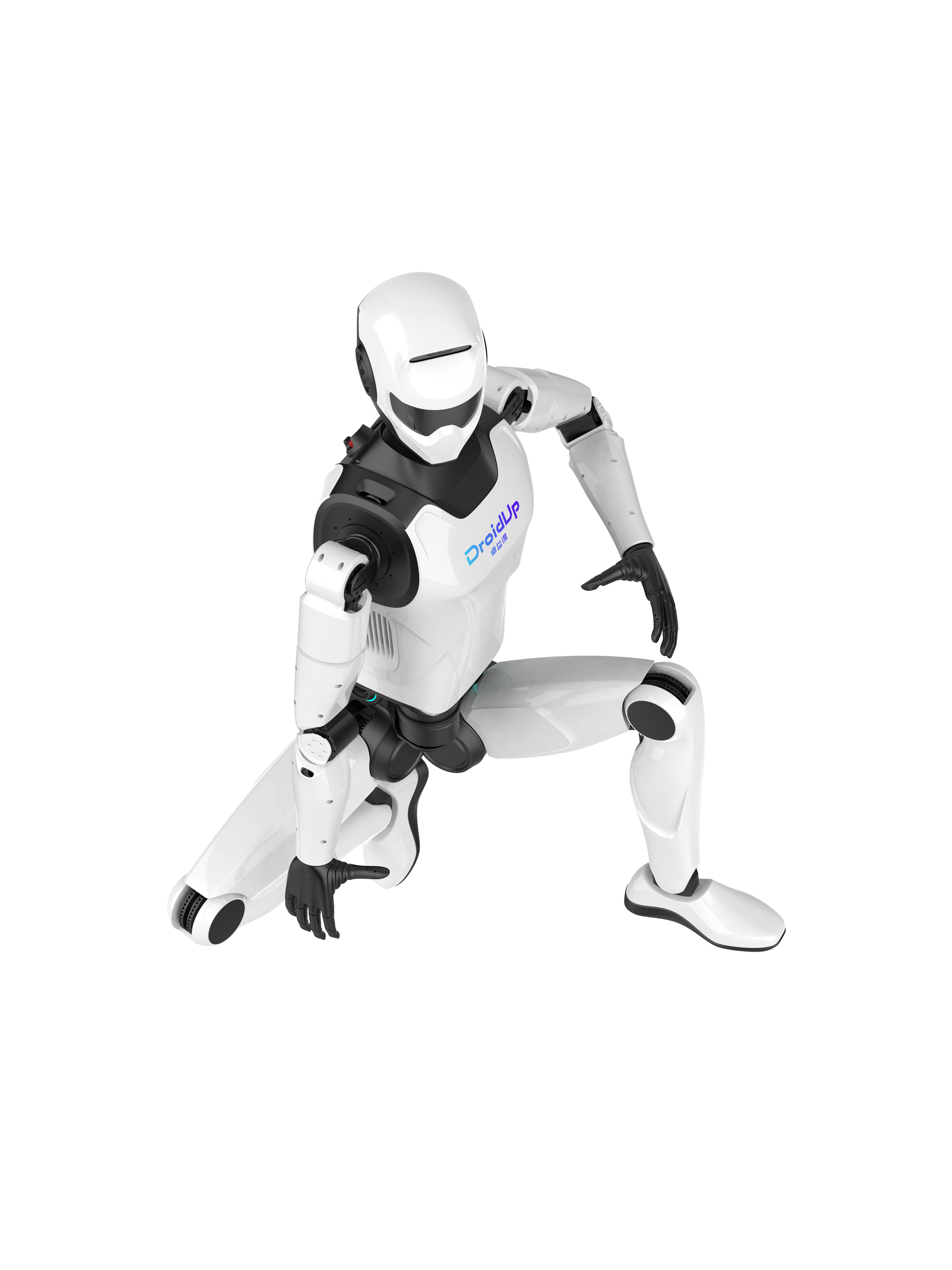
舞台艺术
在文化艺术领域,卓益得以双足机器人技术为核心,推动科技与舞台艺术融合。“学霸 01”作为首个机器人博士入学上海戏剧学院,并成功完成《霸王别机》戏剧展演,以精准肢体控制与情感化动作表达打破传统舞台形式,为“科技+艺术”创作注入活力,双方合作的《巨物之城》机器人舞台剧亦成为这一融合领域的重要实践。
-
赛事走秀
在赛事与公共活动场景中,卓益得机器人持续拓宽应用边界。不仅斩获亦庄半程马拉松季军,展现运动领域的技术稳定性;还登上世界机器人运动会开幕式及京东走秀舞台,以流畅步态诠释科技与时尚的融合魅力,凭借多场景适配能力,为各类活动提供高效技术支撑。